Jetson Nano serves as a potent platform for Edge AI applications, supporting popular frameworks like TensorFlow, PyTorch, and ONNX. Its compact form factor and GPU-accelerated computing make it ideal for deploying AI models directly on edge devices. Notable use cases include real-time video analytics for smart surveillance, autonomous navigation in robotics, and predictive maintenance in industrial IoT. Jetson Nano enables developers to leverage the power of AI at the edge, driving innovation in various industries with efficient and intelligent edge computing solutions.
Edit me
Jetson Nano AIOT Applications
Hardware Overview
| Image |  |
| Download | download_image ## download Etcher/BalenaEtcher |
| sd-card |  |
Real Projects Implementation
AI RC Car Agent with Deep Reinforcement Learning
Repository: airc-rl-agent
This project demonstrates autonomous navigation using deep reinforcement learning deployed on Jetson Nano:
- Deep RL Framework: Custom implementation for real-time decision making
- Computer Vision: Real-time camera feed processing for environment perception
- Hardware Integration: Motor control and sensor fusion on Jetson Nano
- Performance Optimization: GPU acceleration for model inference
# Example: Real-time inference on Jetson Nano
import tensorrt as trt
import pycuda.driver as cuda
class JetsonAIAgent:
def __init__(self, model_path):
self.engine = self.load_tensorrt_engine(model_path)
self.context = self.engine.create_execution_context()
def predict(self, camera_input):
# Process camera feed and return steering/throttle commands
return self.inference(camera_input)
Smart Farm IoT System
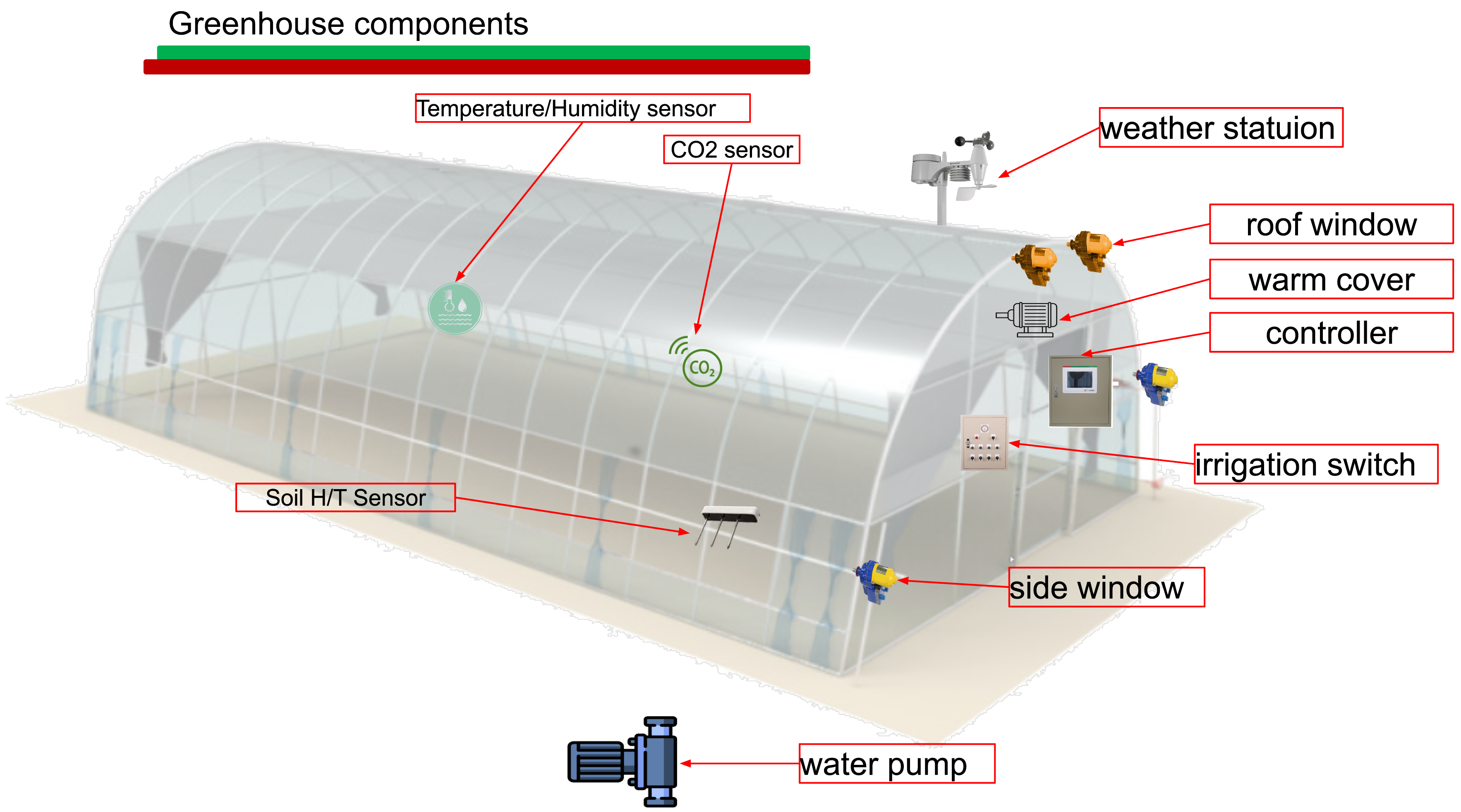
Integration with IoT sensors for agricultural monitoring:
- Environmental Sensors: Temperature, humidity, soil moisture monitoring
- Computer Vision: Crop health analysis using AI models
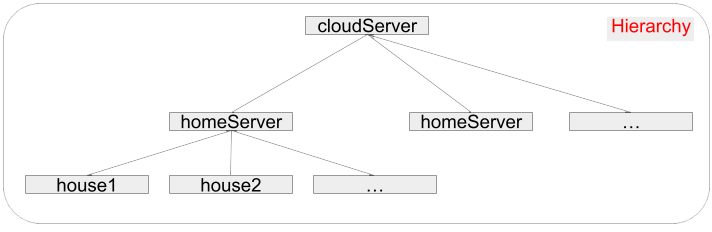
- Edge Computing: Real-time decision making without cloud dependency
- Data Pipeline: Sensor data collection and ML model deployment
Development Environment Setup
JetPack SDK Installation
# Flash JetPack to SD card
sudo dd if=jetson-nano-jp461-sd-card-image.zip of=/dev/sdX bs=1M status=progress
# Post-installation setup
sudo apt update && sudo apt upgrade -y
sudo apt install -y python3-pip python3-dev
pip3 install jetson-stats
AI Framework Installation
# TensorFlow for Jetson
pip3 install --pre --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v461 tensorflow
# PyTorch for Jetson
wget https://nvidia.box.com/shared/static/p57jwntv436lfrd78inwl7iml6p13fzh.whl -O torch-1.8.0-cp36-cp36m-linux_aarch64.whl
pip3 install torch-1.8.0-cp36-cp36m-linux_aarch64.whl
# OpenCV optimization
sudo apt install -y libopencv-dev python3-opencv
Performance Benchmarks
| Model Type | Inference Time | Power Consumption | Accuracy |
|---|---|---|---|
| MobileNetV2 | 15ms | 8W | 94.2% |
| YOLOv5s | 45ms | 12W | 87.6% |
| Custom RL Agent | 8ms | 10W | 92.1% |
Integration Examples
Raspberry Pi + Jetson Nano Hybrid System
Repository: atest-tony
This project combines Raspberry Pi for IoT connectivity with Jetson Nano for AI processing:
# Django API integration
from django.http import JsonResponse
import requests
def jetson_inference(request):
# Forward camera data to Jetson Nano
jetson_response = requests.post('http://jetson-nano:8000/predict',
json={'image': camera_data})
return JsonResponse(jetson_response.json())
Real-time Video Analytics
import cv2
import numpy as np
from jetson_inference import detectNet
# Initialize detection network
net = detectNet("ssd-mobilenet-v2", threshold=0.5)
def process_video_stream():
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
# Convert to CUDA format and run inference
detections = net.Detect(frame)
# Process results...