Project overview
| report | sr-vtol | helicopter, pub in 2008 |
Spherical-VTOL-UAV
This paper presents the design and modeling of the UNI-Copter, a portable spherical unmanned aerial vehicle (UAV) that is powered by a single rotor. This type of single-rotor spherical UAV has many advantages over other types of multi-rotor UAVs, but the spherical external structure takes up more volume, thereby reducing its portability. We focus on designing and building the UNI-Copter to provide ease of assembly and portability while taking advantage of the existing spherical structure.
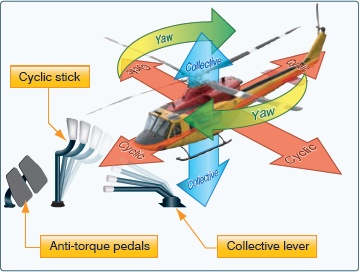
- The swashplate, located at the rotor shaft, consists of one fixed plate and one rotating plate connected to the blades. The plates can be moved up, down and be tilted. By moving the plates up and down the pitch of all of the blades will be changed equally and the lift will increase or decrease without roll or pitch movements.

This paper explains our design concepts and the development process of improving the performance through various prototypes. We also verify flight stability of our new design by conducting several flight tests. To do so, a mathematical model of the UNI-Copter is derived in detail, and then we implement a state feedback controller for hovering flight. As a result, the indoor flight tests show stable performance, and the outdoor flight tests show that stable performance could also be achieved provided that the wind speed is low.
KEYWORDS:UAV, flight computer, Ground station, single rotor, VTOL
Free Body Diagram
Images/FBD.jpg

Final Working Model
{kind=link}

Test Video

The following wiki, pages and posts are tagged with
| Title | Type | Excerpt |
|---|---|---|
| px4 mavlink and qgc integration with 4gremoteoperation | post | Tue, Jan 18, 22, powerful 3d simulation environment for autonomous robots suitable for testing object-avoidance and cv |
| Airlink by skydrone, youtube | post | Friday, airlink for mission flight, LTE connectivity and dl-ready |
| set up with raspi connected to fc | post | Tue, Jan 25, 22, ardupilot documentation |
| drone programming primer for software development | post | Mon, Jan 31, 22, flight stack with firmware middleware and api |
| runcam with fc connection | post | Tue, Feb 15, 22, runcam split 2 with fc |
| my new fixed wing AR Wing Pro, ready for dji HD fpv system | post | Thu, Feb 17, 22, setup guide after opening the package |
| realflight 7 setup and console game | post | Thu, Feb 24, 22, flight simulation with real flight 7 |
| uavmatrix's cast pro docs | post | Tue, Mar 01, 22, another way to integrate devices to gcs |
| firmtech7 of naver cafe raspi drone project | post | Thu, Mar 03, 22, using raspi as fc to control small drone |
| Garupner Polaron ex | post | Sun, Mar 06, 22, polaron 2 channels dc charger |
| svg visualization messages and parameters | post | Mon, Mar 07, 22, organized structure and tree map of px4 messages and parameters |
| lx network, airlink, gcs and data transmission on smart radio, rf mesh and quantum encryption | post | Tue, Apr 26, 22, all about setup and how it operates and managed |
| rflysim tltr | page | |
| drones.md | page | my drones I work with and at my disposal. |
| my 100 supporters | page | my freelancers I work with since 2018. |
| index.md | page | My recent projects are leveraging generative AI across various domains, yielding significant achievements. These encompass Digital Twin, Voice-to-Command, RA... |
| About this site and its author | portfolio | My portofolio site and its mission statement |
| 🔭AIOT projects | page | summary. |
| contents deploy automation | page | Pilot test on the automation prototype. |
| pixhawk apm racing drone | page | summary. |
| Challenger Engineering Project | page | summary. |
| pixhawk tools | page | rFlyeval project details where Matlab Mathwor Simulink were used for complete process of UAV and UAS. |
| Korea drone companies | page | summary. |
| Racing drone, attck drone | page | summary. |
| Django Django Two scoops | page | summary. |
| docker learning curve | page | summary. |
| 🔭 Ground Control Station web-based approach | page | summary. |
| gitlab | page | summary. |
| 🔭lora monitoring app | page | summary. |
| 🔭 MQTT pages | page | summary. |
| My course list | page | my course list from udemy, udacity, NCS and other sources |
| Nextcloud | page | summary. |
| Automation pipeline | page | summary. |
| Pixhawk 4 | page | summary. |
| Pixhawk overview | page | summary. |
| 🔭yuneec realsense obstacle avoidance | page | summary. |
| ROS topic for micro control | page | summary. |
| 🔭 RQt-based gui | page | summary. |
| 🔭sensor detection | page | RealSense with Open3D |
| 🔭Serializer with API | page | summary. |
| Rules of thumb | page | Contact me for any support issues. |
| web-dev ops pages | page | |
| 🔭 Webrtc | page | summary. |
| pixhawk tools advanced | page | rFlyeval project details where Matlab Mathwork Simulink were used for complete process of UAV and UAS. |
| pixhawk tools | page | rFlyeval project details where Matlab Mathwor Simulink were used for complete process of UAV and UAS. |
| Bebop Drone Autonomy: ROS-based Flight Control and Hardware Modifications | post | Deep dive into Parrot Bebop drone modifications and autonomous flight control using ROS. Includes hardware modifications, UART connections, and custom flight... |
{# nothing on index to avoid visible raw text #} ```yaml