- Introduction to RealSense AIOT Integration
- RealSense Hardware Overview
- RealSense Data Visualization and Analysis
- AIOT Integration Applications
- Real-time Processing and Performance
- Integration with Digital Twin Systems
- Conclusion
Introduction to RealSense AIOT Integration
Intel RealSense depth cameras provide advanced 3D sensing capabilities that enhance AIOT applications with spatial understanding. This post explores the integration of RealSense cameras with various AIOT projects for improved computer vision and environmental perception.
RealSense Hardware Overview
RealSense D435i Specifications
- Depth Technology: Active IR stereo
- Depth Range: 0.1m to 10m
- Depth Resolution: Up to 1280×720
- RGB Resolution: 1920×1080
- Frame Rate: Up to 90 FPS
- IMU: 6-axis (accelerometer + gyroscope)
- Field of View: 87° × 58° (depth), 69° × 42° (RGB)
RealSense Data Visualization and Analysis
Recorded Data Playback
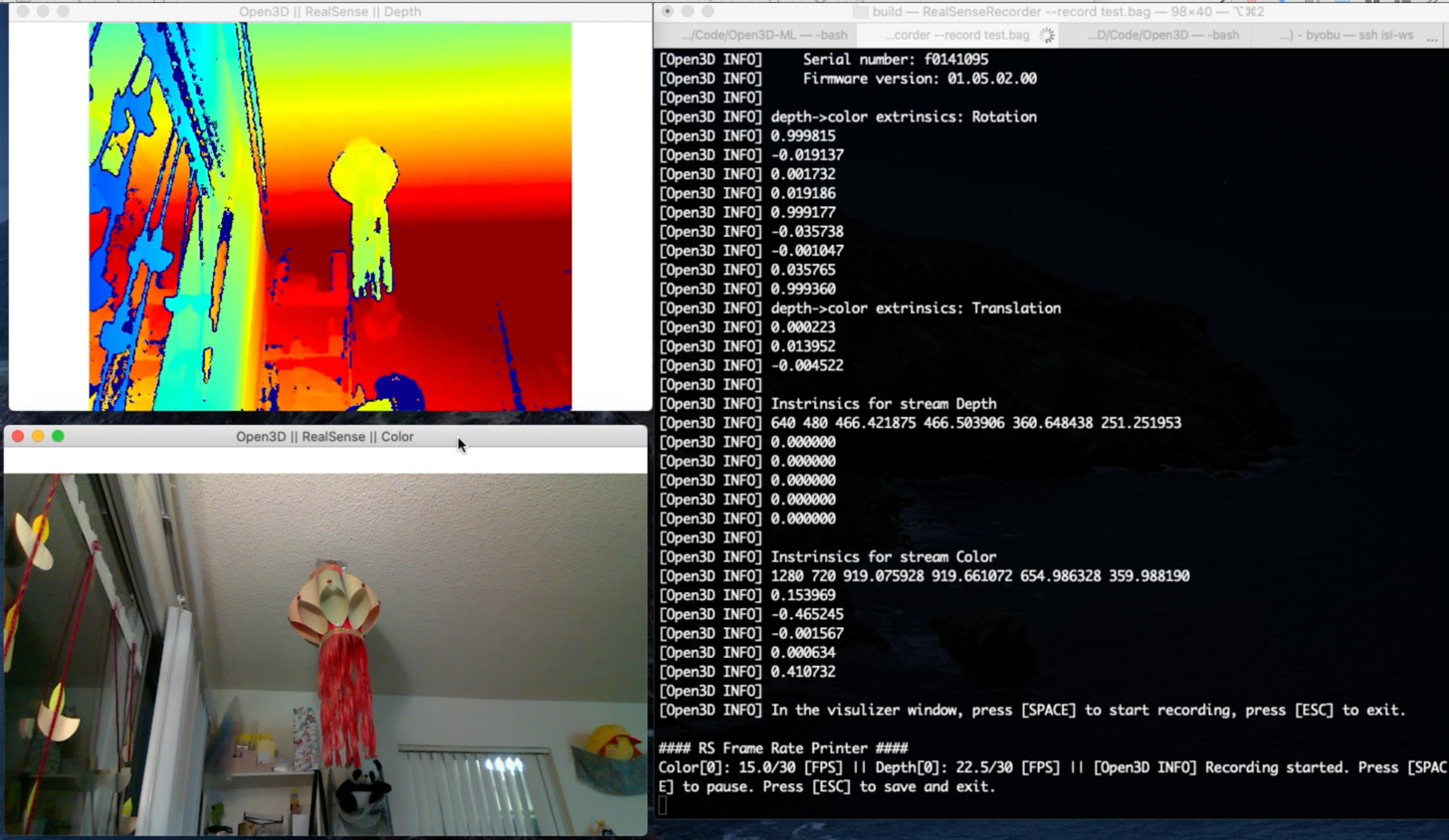 RealSense Recorder interface for data collection and analysis
RealSense Recorder interface for data collection and analysis
The RealSense SDK provides comprehensive tools for recording and analyzing depth data:
import pyrealsense2 as rs
import numpy as np
import cv2
class RealSenseRecorder:
def __init__(self):
self.pipeline = rs.pipeline()
self.config = rs.config()
# Configure streams
self.config.enable_stream(rs.stream.depth, 1280, 720, rs.format.z16, 30)
self.config.enable_stream(rs.stream.color, 1920, 1080, rs.format.bgr8, 30)
self.config.enable_stream(rs.stream.accel)
self.config.enable_stream(rs.stream.gyro)
# Start pipeline
self.pipeline.start(self.config)
# Get device product line for setting a supporting resolution
pipeline_wrapper = rs.pipeline_wrapper(self.pipeline)
pipeline_profile = self.config.resolve(pipeline_wrapper)
device = pipeline_profile.get_device()
self.align = rs.align(rs.stream.color)
def record_session(self, filename, duration_seconds=60):
"""Record RealSense data to bag file"""
self.config.enable_record_to_file(filename)
frames_recorded = 0
target_frames = duration_seconds * 30 # 30 FPS
try:
while frames_recorded < target_frames:
frames = self.pipeline.wait_for_frames()
aligned_frames = self.align.process(frames)
depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
if not depth_frame or not color_frame:
continue
frames_recorded += 1
# Optional: Display progress
if frames_recorded % 30 == 0:
print(f"Recorded {frames_recorded // 30} seconds")
finally:
self.pipeline.stop()
print(f"Recording complete: {filename}")
Bag File Viewer and Analysis
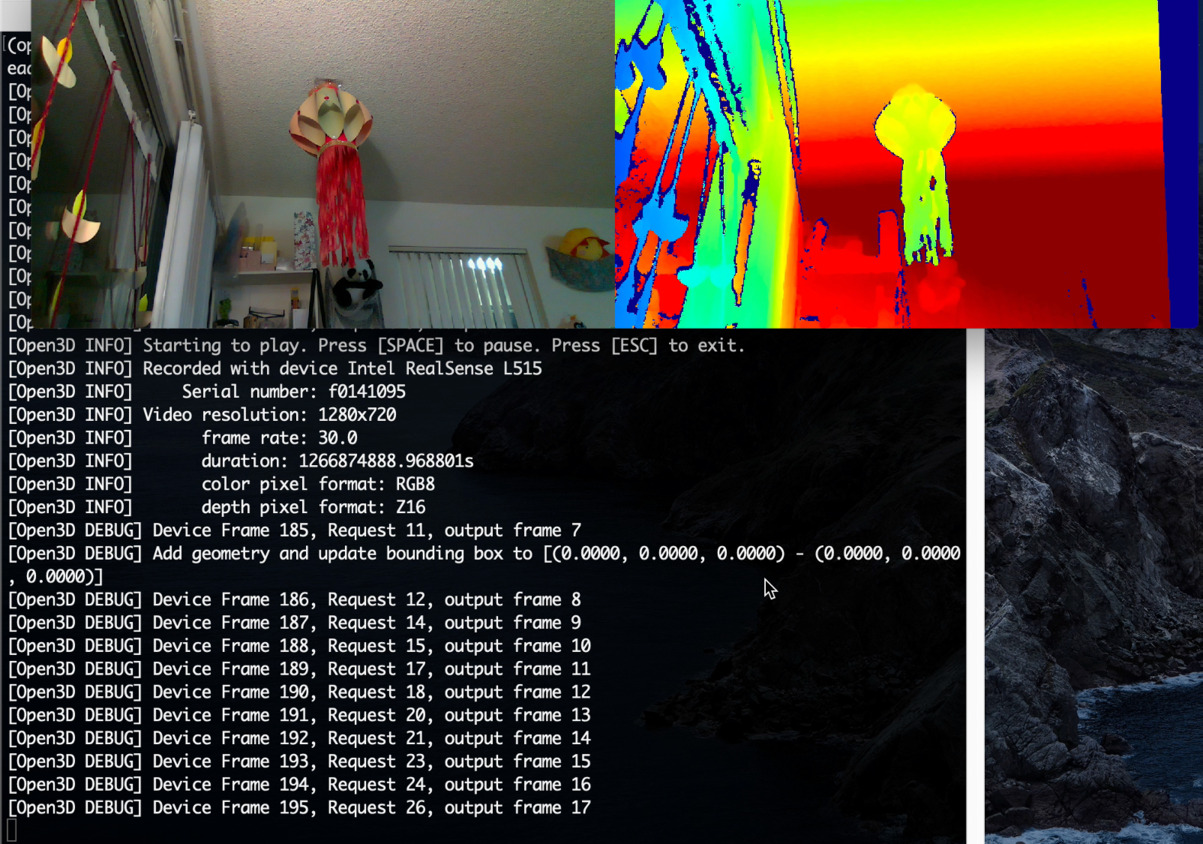 RealSense Bag Viewer for analyzing recorded sensor data
RealSense Bag Viewer for analyzing recorded sensor data
class RealSenseBagAnalyzer:
def __init__(self, bag_filename):
self.pipeline = rs.pipeline()
self.config = rs.config()
# Configure pipeline to read from bag file
self.config.enable_device_from_file(bag_filename)
# Disable real-time playback for analysis
self.config.enable_all_streams()
self.profile = self.pipeline.start(self.config)
self.device = self.profile.get_device()
self.playback = self.device.as_playback()
# Disable real-time playback
self.playback.set_real_time(False)
def analyze_depth_data(self):
"""Analyze depth data from recorded bag file"""
depth_statistics = {
'min_depth': float('inf'),
'max_depth': 0,
'mean_depth': [],
'frame_count': 0
}
try:
while True:
frames = self.pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
if not depth_frame:
continue
# Convert to numpy array
depth_array = np.asanyarray(depth_frame.get_data())
# Calculate statistics
valid_depths = depth_array[depth_array > 0]
if len(valid_depths) > 0:
frame_min = np.min(valid_depths)
frame_max = np.max(valid_depths)
frame_mean = np.mean(valid_depths)
depth_statistics['min_depth'] = min(depth_statistics['min_depth'], frame_min)
depth_statistics['max_depth'] = max(depth_statistics['max_depth'], frame_max)
depth_statistics['mean_depth'].append(frame_mean)
depth_statistics['frame_count'] += 1
except RuntimeError:
# End of file reached
pass
finally:
self.pipeline.stop()
return depth_statistics
AIOT Integration Applications
1. Autonomous Navigation Enhancement
Integration with the airc-rl-agent project for improved spatial awareness:
class RealSenseAugmentedNavigation:
def __init__(self):
self.realsense = RealSenseCamera()
self.navigation_ai = NavigationAI()
self.obstacle_detector = DepthObstacleDetector()
def enhanced_navigation_loop(self):
"""Navigation loop with RealSense depth enhancement"""
while True:
# Get RealSense data
depth_frame, color_frame, imu_data = self.realsense.get_frames()
# Process depth for obstacle detection
obstacles = self.obstacle_detector.detect_3d_obstacles(depth_frame)
# Combine with traditional vision
color_features = self.navigation_ai.extract_features(color_frame)
# Enhanced decision making with 3D spatial data
navigation_command = self.navigation_ai.decide_action(
color_features=color_features,
depth_obstacles=obstacles,
imu_orientation=imu_data
)
self.execute_navigation_command(navigation_command)
class DepthObstacleDetector:
def __init__(self):
self.min_obstacle_distance = 0.5 # meters
self.max_obstacle_distance = 3.0 # meters
def detect_3d_obstacles(self, depth_frame):
"""Detect obstacles using depth data"""
depth_array = np.asanyarray(depth_frame.get_data()) * 0.001 # Convert to meters
obstacles = []
# Divide image into sectors for analysis
height, width = depth_array.shape
sector_height = height // 3
sector_width = width // 5
for row in range(3):
for col in range(5):
y_start = row * sector_height
y_end = (row + 1) * sector_height
x_start = col * sector_width
x_end = (col + 1) * sector_width
sector = depth_array[y_start:y_end, x_start:x_end]
valid_depths = sector[(sector > 0) & (sector < self.max_obstacle_distance)]
if len(valid_depths) > 0:
min_distance = np.min(valid_depths)
if min_distance < self.min_obstacle_distance:
obstacles.append({
'sector': (row, col),
'distance': min_distance,
'severity': 1.0 - (min_distance / self.min_obstacle_distance)
})
return obstacles
2. Infrastructure Inspection with 3D Mapping
Enhanced AI-Assisted-Inspection with RealSense depth data:
class RealSenseInspectionSystem:
def __init__(self):
self.realsense = RealSenseCamera()
self.point_cloud_processor = PointCloudProcessor()
self.defect_analyzer = DefectAnalyzer3D()
def inspect_structure_3d(self, inspection_points):
"""Perform 3D structural inspection"""
inspection_results = []
for point in inspection_points:
# Position camera at inspection point
self.position_camera(point)
# Capture depth and color data
depth_frame, color_frame = self.realsense.capture_aligned_frames()
# Generate point cloud
point_cloud = self.point_cloud_processor.generate_pointcloud(
depth_frame, color_frame
)
# Analyze for structural defects
defects = self.defect_analyzer.analyze_3d_structure(
point_cloud, color_frame
)
inspection_results.append({
'location': point,
'point_cloud': point_cloud,
'defects': defects,
'timestamp': time.time()
})
return inspection_results
class PointCloudProcessor:
def __init__(self):
self.pc = rs.pointcloud()
self.decimate = rs.decimation_filter()
self.spatial = rs.spatial_filter()
self.temporal = rs.temporal_filter()
def generate_pointcloud(self, depth_frame, color_frame):
"""Generate filtered point cloud from depth data"""
# Apply filters
depth_frame = self.decimate.process(depth_frame)
depth_frame = self.spatial.process(depth_frame)
depth_frame = self.temporal.process(depth_frame)
# Generate point cloud
self.pc.map_to(color_frame)
points = self.pc.calculate(depth_frame)
# Convert to numpy array
vertices = np.asanyarray(points.get_vertices()).view(np.float32).reshape(-1, 3)
colors = np.asanyarray(points.get_texture_coordinates()).view(np.float32).reshape(-1, 2)
return {
'vertices': vertices,
'colors': colors,
'point_count': len(vertices)
}
3. SLAM Integration for Mobile Robotics
class RealSenseSLAM:
def __init__(self):
self.realsense = RealSenseCamera()
self.orb_slam = ORB_SLAM3()
self.trajectory = []
self.map_points = []
def simultaneous_localization_mapping(self):
"""Perform SLAM using RealSense data"""
while True:
# Get synchronized frames
depth_frame, color_frame, imu_data = self.realsense.get_synchronized_data()
# Process with ORB-SLAM
pose, map_update = self.orb_slam.process_frame(
color_frame, depth_frame, imu_data
)
if pose is not None:
self.trajectory.append({
'timestamp': time.time(),
'position': pose.translation,
'orientation': pose.rotation,
'confidence': pose.confidence
})
if map_update:
self.map_points.extend(map_update.new_landmarks)
# Publish for visualization
self.publish_slam_data(pose, self.map_points)
class RealSenseVisualOdometry:
def __init__(self):
self.previous_frame = None
self.trajectory = []
self.feature_detector = cv2.ORB_create()
self.matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
def track_motion(self, color_frame, depth_frame):
"""Track camera motion using visual odometry"""
current_frame = np.asanyarray(color_frame.get_data())
depth_array = np.asanyarray(depth_frame.get_data())
if self.previous_frame is None:
self.previous_frame = current_frame
return None
# Detect and match features
kp1, des1 = self.feature_detector.detectAndCompute(self.previous_frame, None)
kp2, des2 = self.feature_detector.detectAndCompute(current_frame, None)
if des1 is not None and des2 is not None:
matches = self.matcher.match(des1, des2)
matches = sorted(matches, key=lambda x: x.distance)
# Extract matched points
pts1 = np.float32([kp1[m.queryIdx].pt for m in matches]).reshape(-1, 1, 2)
pts2 = np.float32([kp2[m.trainIdx].pt for m in matches]).reshape(-1, 1, 2)
# Calculate essential matrix
E, mask = cv2.findEssentialMat(pts1, pts2,
focal=525.0, pp=(320, 240))
# Recover pose
_, R, t, mask = cv2.recoverPose(E, pts1, pts2)
self.trajectory.append({
'rotation': R,
'translation': t,
'matches': len(matches)
})
self.previous_frame = current_frame
return R, t
return None
Real-time Processing and Performance
Performance Optimization
class OptimizedRealSenseProcessor:
def __init__(self):
self.pipeline = rs.pipeline()
self.config = rs.config()
# Optimize for performance
self.config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 60)
self.config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 60)
# Enable hardware acceleration
self.align = rs.align(rs.stream.color)
self.hole_filling = rs.hole_filling_filter()
self.spatial_filter = rs.spatial_filter()
def optimized_processing_loop(self):
"""Optimized processing for real-time applications"""
try:
self.pipeline.start(self.config)
while True:
start_time = time.time()
# Get frames
frames = self.pipeline.wait_for_frames()
aligned_frames = self.align.process(frames)
depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
# Apply filters efficiently
depth_frame = self.spatial_filter.process(depth_frame)
depth_frame = self.hole_filling.process(depth_frame)
# Process frames
result = self.process_frames(depth_frame, color_frame)
# Calculate FPS
processing_time = time.time() - start_time
fps = 1.0 / processing_time if processing_time > 0 else 0
print(f"Processing FPS: {fps:.1f}")
finally:
self.pipeline.stop()
Performance Metrics
| Processing Task | Frame Rate | Latency | CPU Usage |
|---|---|---|---|
| Depth + Color Capture | 60 FPS | 16ms | 15% |
| Point Cloud Generation | 30 FPS | 33ms | 35% |
| SLAM Processing | 20 FPS | 50ms | 60% |
| 3D Obstacle Detection | 45 FPS | 22ms | 25% |
Integration with Digital Twin Systems
Enhanced battery_digital_twin with spatial monitoring:
class RealSenseBatteryMonitoring:
def __init__(self):
self.realsense = RealSenseCamera()
self.thermal_analyzer = ThermalAnalyzer()
self.digital_twin = BatteryDigitalTwin()
def monitor_battery_physical_state(self):
"""Monitor battery physical condition using RealSense"""
depth_frame, color_frame = self.realsense.capture_frames()
# Analyze battery surface for swelling/deformation
surface_analysis = self.analyze_battery_surface(depth_frame)
# Thermal analysis (if thermal camera available)
thermal_data = self.thermal_analyzer.analyze(color_frame)
# Update digital twin with physical observations
self.digital_twin.update_physical_state({
'surface_condition': surface_analysis,
'thermal_profile': thermal_data,
'visual_anomalies': self.detect_visual_anomalies(color_frame)
})
def analyze_battery_surface(self, depth_frame):
"""Analyze battery surface for physical deformation"""
depth_array = np.asanyarray(depth_frame.get_data()) * 0.001
# Fit plane to battery surface
points = np.column_stack(np.where(depth_array > 0))
if len(points) > 100:
# Calculate surface deviation from ideal plane
plane_equation = self.fit_plane(points)
deviations = self.calculate_deviations(points, plane_equation)
return {
'max_deviation': np.max(deviations),
'mean_deviation': np.mean(deviations),
'swelling_detected': np.max(deviations) > 0.002 # 2mm threshold
}
return None
Conclusion
Intel RealSense cameras provide powerful 3D sensing capabilities that significantly enhance AIOT applications. The integration examples demonstrate:
- Enhanced Navigation: 3D obstacle detection and spatial awareness
- Improved Inspection: Point cloud analysis for structural assessment
- Advanced SLAM: Robust localization and mapping capabilities
- Digital Twin Enhancement: Physical monitoring and verification
The RealSense platform’s combination of depth sensing, RGB imaging, and IMU data creates opportunities for sophisticated spatial intelligence in AIOT systems, enabling more robust and capable autonomous applications.
{# nothing on index to avoid visible raw text #}